Shortest path
Dijkstra’s algorithm is commonly used to get the shortest path from a starting vertex to an end vertex on a graph with non-negative weights.
Two sets are maintained at each step: a set of explored nodes which have already been visited and a set of not-yet-visited nodes whose minimum distance from the start node may change at any time a better path is discovered. If an adjacency list to traverse the graph in \( O(V+E) \) is used together with a binary heap to track the minimum of the not-yet-explored set in \( O(\log{V}) \), the overall is \( O((E+V)\log{V}) \).
for every node V
costToReachNode[V] = +inf
costToReachNode[0] = 0 // Root node
heap = create a heap with the costToReachNode for all the nodes
while(heap is not empty)
node = getMinimumCostNode(heap)
if(costToReachNode[node] == +inf)
break; // No other node can be reached
for every edge from node
updateMinimumDistanceCosts(edge) // Updates if a better distance was found
The algorithm might seem similar to Prim’s algorithm for minimum spanning trees but there’s a substantial difference between the two: Prim is a classic greedy algorithm which explores new vertices and stores the minimum cost edge to reach one. Prim has no memory of the previous structure of the graph while Dijkstra’s keeps a sum of the distance spent to reach a vertex when comparing it with a new distance discovered. This memory property ensures that the optimal shortest path is always found. Many other pathfinding algorithms (notably A*) also build and expand on this principle.
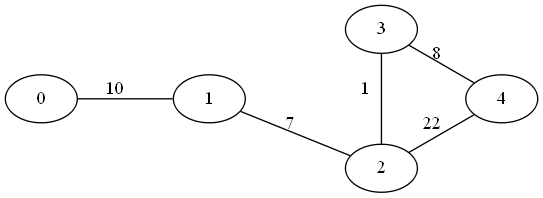
The following code uses the same mutable binary heap structure used in the MST post to speed up the algorithm on the following graph
#include <iostream>
#include <tuple>
#include <algorithm>
#include <list>
#include <map>
#include <vector>
#include <limits>
using namespace std;
template<typename Type, typename ExtraData>
class MutableMinHeap {
vector<tuple<size_t, Type, ExtraData>> data;
map<size_t, size_t> positionMap;
size_t progressiveIndex = -1;
public:
// Inserts an element leaving the heap in a possibly invalid state
// Returns an index that can be used to refer to the same node later
size_t insertElementNoHeapify(Type weight, ExtraData extraData) {
++progressiveIndex;
data.emplace_back(progressiveIndex, weight, extraData);
positionMap[progressiveIndex] = data.size() - 1;
return progressiveIndex;
}
void removeTopElementNoHeapify() {
if (data.size() <= 0)
throw runtime_error("No elements in the heap");
size_t progrId = get<0>(data.front());
swap(positionMap[get<0>(data[0])], positionMap[get<0>(data[data.size() - 1])]);
swap(data[0], data[data.size() - 1]);
positionMap.erase(progrId);
data.resize(data.size() - 1);
}
void heapify() { // Reheapify through swimDown O(N)
size_t currentNode = data.size();
while (currentNode > 1) {
// Set up indices for parent node and left/right nodes (if they exist)
size_t parent = currentNode / 2;
size_t left = parent * 2;
left = (left <= data.size()) ? left - 1 : -1;
size_t right = parent * 2 + 1;
right = (right <= data.size()) ? right - 1 : -1;
--parent;
// Get the minimum in this subtree
Type minimum = get<1>(data[parent]);
size_t minElement = parent;
if (left != -1 && get<1>(data[left]) < minimum)
minElement = left;
if (right != -1 && get<1>(data[right]) < minimum)
minElement = right;
if (minElement != parent) { // Swap and update indices
swap(data[parent], data[minElement]);
size_t s1 = get<0>(data[parent]);
size_t s2 = get<0>(data[minElement]);
swap(positionMap[s1], positionMap[s2]);
}
currentNode -= 2;
}
}
tuple<size_t, Type, ExtraData>& getTopElement() {
if (data.size() > 0)
return data[0];
else
throw runtime_error("No elements in the heap");
}
// Access an element in the heap. If the weight is modified, a
// reheapify will then be needed
tuple<size_t, Type, ExtraData>& accessItem(size_t index) {
return data[positionMap[index]];
}
bool empty() const {
if (data.size() == 0)
return true;
else
return false;
}
bool isElementInHeap(size_t index) {
if (positionMap.find(index) == positionMap.end())
return false;
else
return true;
}
};
struct Edge {
int v;
int weight;
};
class Graph {
public:
Graph(int V) {
adjacencyList.resize(V);
numberOfVertices = V;
nodeIndices.resize(V);
for (int i = 0; i < numberOfVertices; ++i) {
nodeIndices[i] = heap.insertElementNoHeapify(numeric_limits<int>::max(), i);
heapIndexToAdjIndex[nodeIndices[i]] = i;
}
}
void addEdge(int u, int v, int w) {
adjacencyList[u].push_back({ v, w });
}
void setStartPoint(int node) {
startPoint = node;
}
void setEndPoint(int node) {
endPoint = node;
}
vector<tuple<int, int, int>> getSP() {
// Predecessor for every node in the optimal path
vector<int> predecessor(numberOfVertices, -1);
vector<int> minDist(numberOfVertices, numeric_limits<int>::max());
// Start from root node
auto& root = heap.accessItem(nodeIndices[startPoint]);
get<1>(root) = 0;
minDist[startPoint] = 0;
heap.heapify(); // Reorder the heap
while (heap.empty() == false) {
// Get closest point on the fringe
auto& closest = heap.getTopElement();
if (get<1>(closest) == numeric_limits<int>::max())
break; // Can't reach any other vertex
if (get<0>(closest) == endPoint)
break; // Found our destination
// Update any adjacent vertex with a new path
for (auto& e : adjacencyList[heapIndexToAdjIndex[get<0>(closest)]]) {
if (minDist[e.v] > get<1>(closest) + e.weight) {
auto& heapVertex = heap.accessItem(nodeIndices[e.v]);
get<1>(heapVertex) = get<1>(closest) + e.weight;
minDist[e.v] = get<1>(closest) + e.weight;
predecessor[e.v] = heapIndexToAdjIndex[get<0>(closest)];
}
}
// Remove it from the queue (i.e. visited)
heap.removeTopElementNoHeapify();
heap.heapify();
}
// Reconstruct the shortest path
vector<tuple<int, int, int>> resultEdges; // u,v,w
int cur = endPoint;
int pred = predecessor[cur];
while (pred != startPoint && pred != -1) {
resultEdges.emplace_back(pred, cur, minDist[cur] - minDist[pred]);
cur = predecessor[cur];
pred = predecessor[cur];
}
resultEdges.emplace_back(startPoint, cur, minDist[cur] - minDist[startPoint]);
return resultEdges;
}
private:
vector<list<Edge>> adjacencyList;
int numberOfVertices;
int startPoint, endPoint;
MutableMinHeap<int, int> heap;
vector<size_t> nodeIndices;
map<size_t, int> heapIndexToAdjIndex;
};
int main() {
Graph graph(5);
graph.addEdge(0, 1, 10); // u,v,w
graph.addEdge(1, 2, 7);
graph.addEdge(2, 3, 1);
graph.addEdge(3, 4, 8);
graph.addEdge(2, 4, 22);
graph.setStartPoint(0);
graph.setEndPoint(4);
auto res = graph.getSP();
if (res.size() == 0 || get<2>(res[0]) == numeric_limits<int>::max()) {
cout << "No shortest path exists" << endl;
return 0;
}
cout << "Found shortest path from node " << 0 << " to node " << 4 << ":" << endl;
for (auto& e : res)
cout << "{" << get<0>(e) << ";" << get<1>(e) << "} with weight "
<< get<2>(e) << endl;
return 0;
}Output
Found shortest path from node 0 to node 4:
{3;4} with weight 8
{2;3} with weight 1
{1;2} with weight 7
{0;1} with weight 10