Line segments intersection
The problem can be expressed as follows: given two line segments \( {p_1,p_2} \) and \( {p_3,p_4} \) check if they intersect with each other.
Before discussing a possible solution a concept has to be introduced: orientation.
Orientation
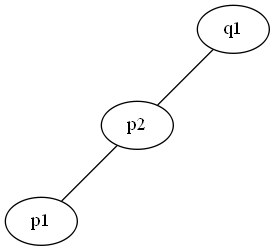
The orientation of an ordered triplet of points \( {p_1,p_2,q_1} \) in the plane can be defined as
- Clockwise
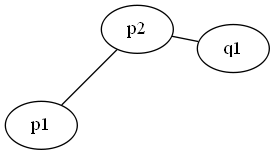
- Counterclockwise
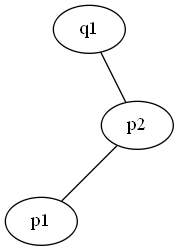
- Collinear
Orientation plays a crucial role in the intersection test. Let the slopes of the segments be respectively \( \sigma,\tau \)
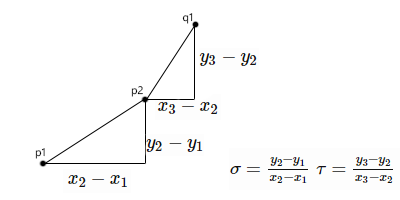
the orientation test should return
- Counterclockwise if \( \sigma < \tau \)
- Clockwise if \( \sigma > \tau \)
- Collinear if \( \sigma = \tau \)
The orientation therefore depends on the expression
\[(y_2 - y_1)(x_3 - x_2) - (y_3 - y_2)(x_2 - x_1)\]yielding a positive, zero or negative result. In code
int orientation(const Point& p1, const Point& p2, const Point& q1) {
int val = (p2.y - p1.y) * (q1.x - p2.x) - (q1.y - p2.y) * (p2.x - p1.x);
if (val == 0)
return 0;
else
return (val < 0) ? -1 : 1;
}Intersection test
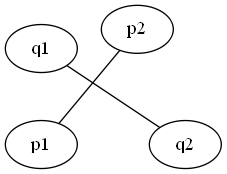
Two segments \( {p_1,p_2} \) and \( {q_1,q_2} \) intersect \( \iff \) one of the following conditions is verified
-
General case
\( {p_1,p_2,q_1} \) and \( {p_1,p_2,q_2} \) have different orientations and \( {q_1,q_2,p_1} \) and \( {q_1,q_2,p_2} \) have different orientations
-
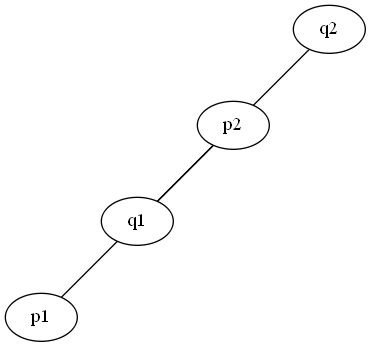
Special case
All the points are collinear and either \( q_1 \) lies between \( p_1 \) and \( p_2 \) or \( q_2 \) lies between \( p_1 \) and \( p_2 \) (by checking the x-projections and y-projections).
The code for intersection testing follows
#include <iostream>
#include <string>
#include <algorithm>
using namespace std;
struct Point {
int x, y;
};
ostream& operator<<(ostream& os, const Point& p) {
os << "{" << p.x << ";" << p.y << "}";
return os;
}
int orientation(const Point& p1, const Point& p2, const Point& q1) {
int val = (p2.y - p1.y) * (q1.x - p2.x) - (q1.y - p2.y) * (p2.x - p1.x);
if (val == 0)
return 0;
else
return (val < 0) ? -1 : 1;
}
// Returns true if q lies on p1-p2
bool onSegment(const Point& p1, const Point& p2, const Point& q) {
if (min(p1.x, p2.x) <= q.x && q.x <= max(p1.x, p2.x)
&& min(p1.y, p2.y) <= q.y && q.y <= max(p1.y, p2.y))
return true;
else
return false;
}
bool intersectionTest(const Point& p1, const Point& p2,
const Point& p3, const Point& p4) {
int o1 = orientation(p1, p2, p3);
int o2 = orientation(p1, p2, p4);
int o3 = orientation(p3, p4, p1);
int o4 = orientation(p3, p4, p2);
// General case
if (o1 != o2 && o3 != o4)
return true;
// Special cases
if (o1 == 0 && onSegment(p1, p2, p3))
return true;
if (o2 == 0 && onSegment(p1, p2, p4))
return true;
if (o3 == 0 && onSegment(p3, p4, p1))
return true;
if (o4 == 0 && onSegment(p3, p4, p2))
return true;
return false;
}
int main() {
auto printIntersection = [](auto p1, auto p2, auto p3, auto p4) {
cout << boolalpha << "Intersection between segment " << p1 << " - "
<< p2 << " and segment " << p3 << " - " << p4 << ": " <<
intersectionTest(p1, p2, p3, p4) << endl;
};
Point p1{ 0, 0 }, p2{ 5, 2 }, p3{ 0, 2 }, p4{ 7, 0 };
printIntersection(p1, p2, p3, p4);
p1 = { 0, 0 }, p2 = { 2, 2 }, p3 = { 1, 1 }, p4 = { 7, 1 };
printIntersection(p1, p2, p3, p4);
p1 = { 0, 0 }, p2 = { 2, 2 }, p3 = { 1, 0 }, p4 = { 3, 2 };
printIntersection(p1, p2, p3, p4);
p1 = { 0, 0 }, p2 = { 2, 2 }, p3 = { 1, 1 }, p4 = { 4, 4 };
printIntersection(p1, p2, p3, p4);
return 0;
}